|
Advertisement / Annons: |
My astronomy project:
|
Content:
Note: |
6, Schematic / setup:Before I start to experimenting with different setups I need a drawing, some schematic. There are a lot of them but couldn't find any exactly how I want it. Here I take parts from two different drawings. Arduino Nano and DRW8825 driver: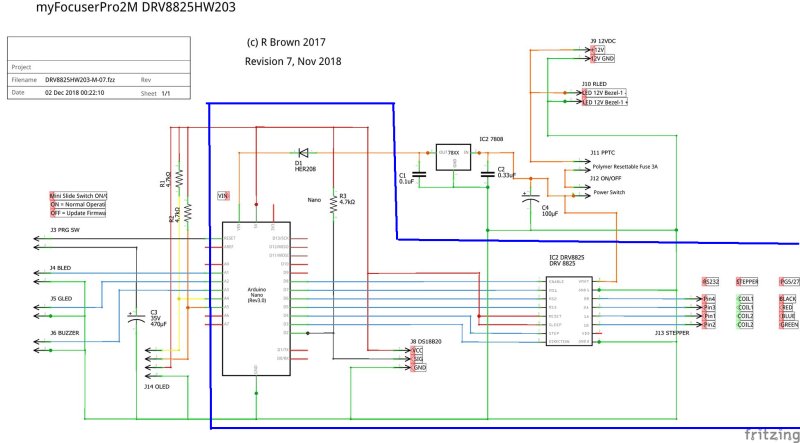 Credit: R Brown
Credit: R Brown
From this drawing I use the part that's framed in blue. Here you can find the original schematic and read more about it: Arduino Focuser Pro 2. This device will always be connected to USB power and doesn't need external 5 Volt power. But the stepper motor need 12 Volt direct to it. I have also included the three pin connector to the thermometer. LED indicators and push buttons: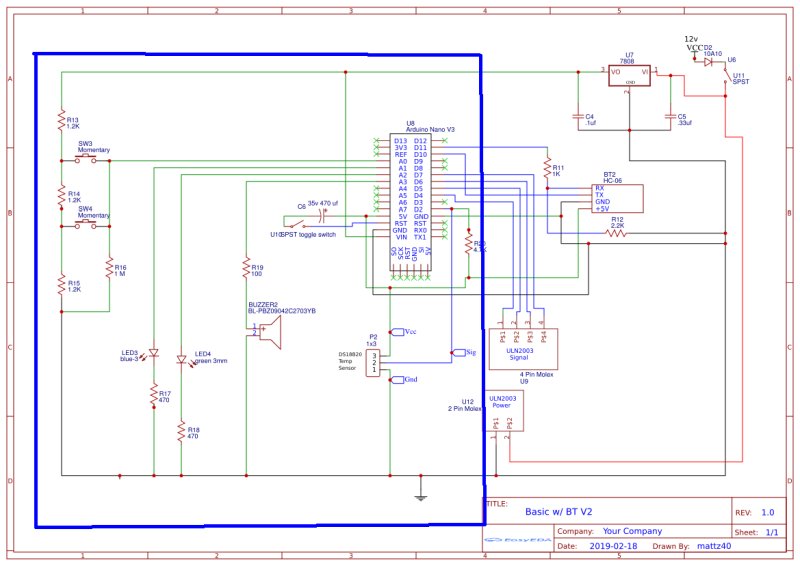 Credit: Mattz40
Credit: Mattz40
Framed in blue. A blue and green LED indicate if the stepper moves outwards or inwards. Normally its operated from the computer over INDI driver, but for test purpose it can be operated by two push buttons. The Push buttons are connected to an analog input. A resistor network send different voltage for different combinations, both buttons pushed together reset the position counter. There is also a reset switch included. Here is more info about Mattz40's project: CloudyNights. Later when I have verified that it works how I want it I do my own schematic how I have it connected. Setup IN/OUT push buttons: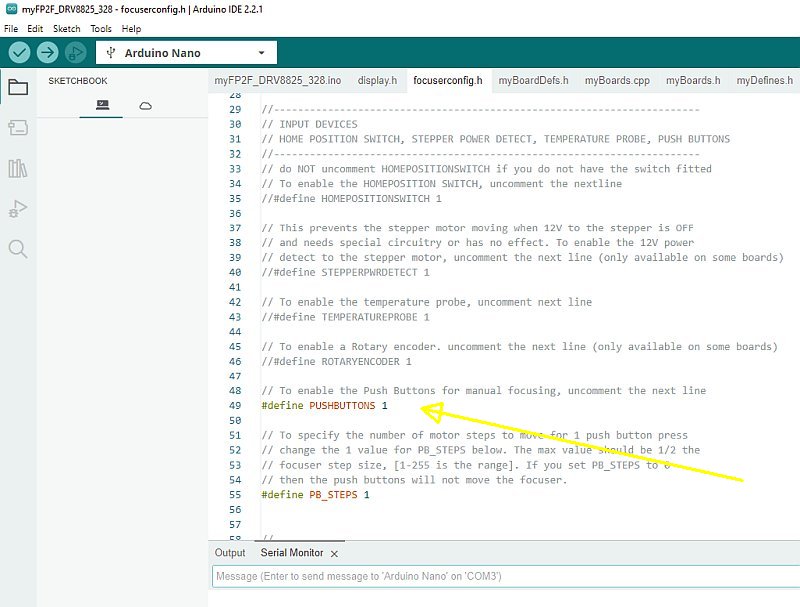
The MyFocuserPro2 focus controller is very flexible. For my version I need to enable the IN/OUT push buttons. It's done in the file focuserconfig.h, you get instruction from the document which can be downloader from files here: Arduino Focuser Pro 2. Setup IN/OUT LEDs: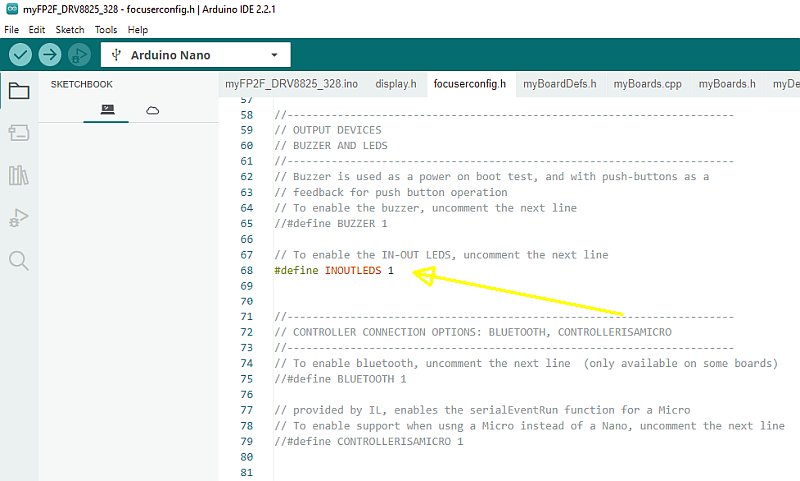
In the same setup file you also find the line that enable the IN/OUT LEDs if you want them. Setup pin layout: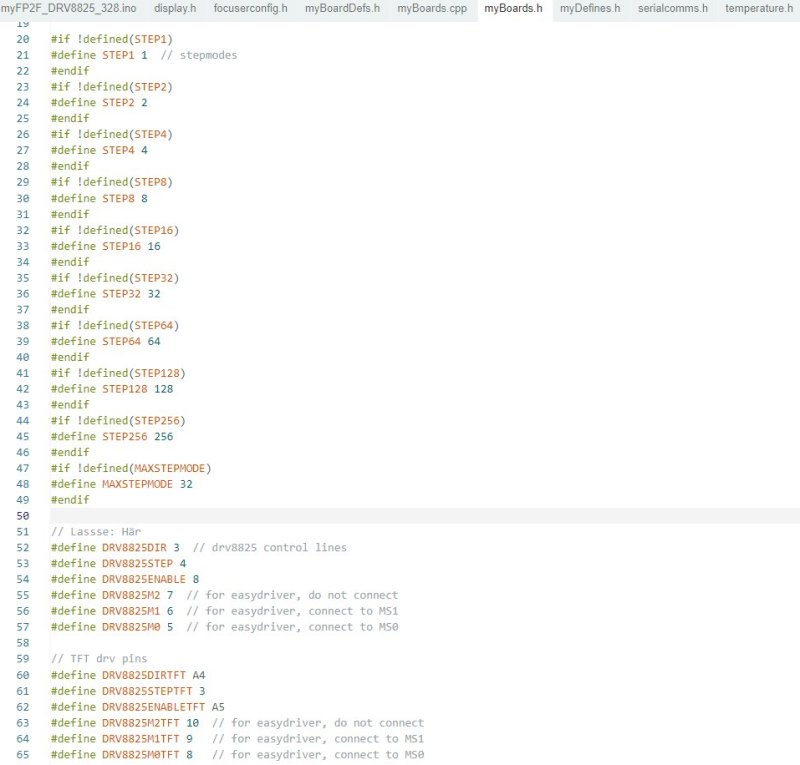
Later when I setup INDI driver for different micro stepping's mode I found that it doesn't worked as it should. After some investigating I found that the Arduino address wrong output pins that control the driver circuit. It's the line 55 and 57 that are wrong in the above code. 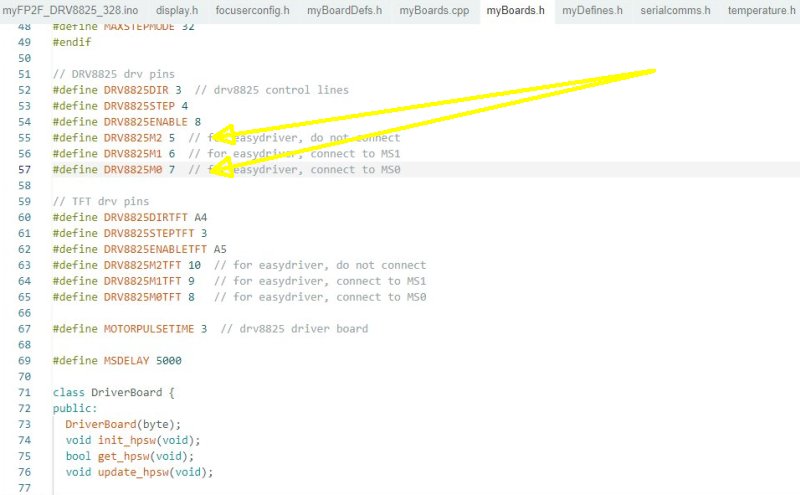
After I had mirror the pin layout, compile and upload to the Arduino it worked as it should.
|
|