|
Advertisement / Annons: |
My astronomy tutorials:
|
Contents:
Note: |
2, Drift align and auto guide calibration:With auto guiding small errors in the polar align and not so precise mounts can be handled. Still it's important to have the polar align as good you can get it. This is connected to my test of the EQ6 mount after I converted it to belt drive. Auto guide calibration: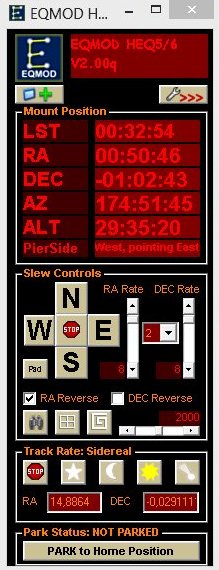
With polar align correct I can start with the auto guiding calibration. Take a star in Southern direction close to the meridian and at the celestial equator (DEC = 0). 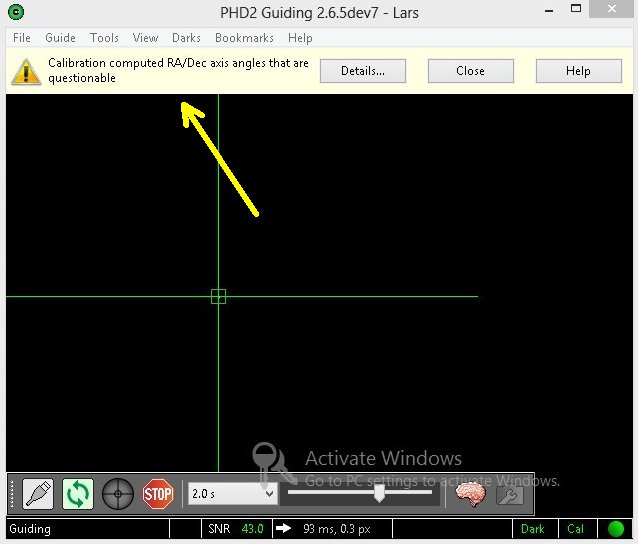
After a while PHD2 gives an alarm and complain about the orthogonality between the RA and the DEC axis. Maybe something related to the strange behavior of the RA rotation speed I noticed earlier. This is the first time I have it setup with a non standard gear ratio, maybe some mistake I did. 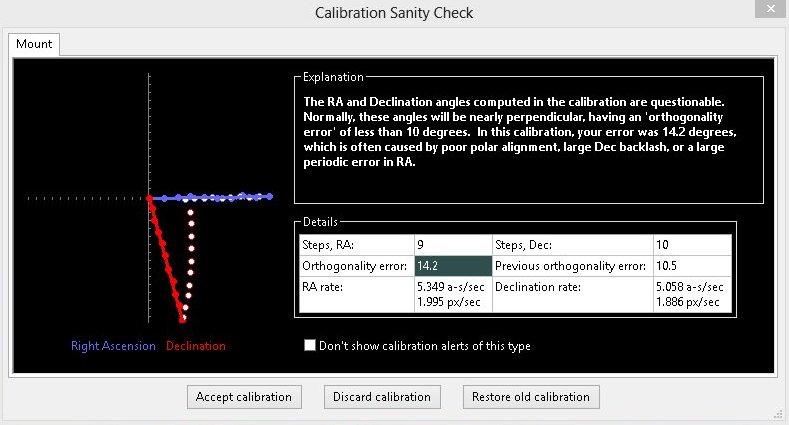
More information from PHD2, the orthogonality error is 14 degrees, the mount is made with the axis 90 degree apart with high precision so the error should be almost zero. But there are also other things that can cause this error, see the message above. 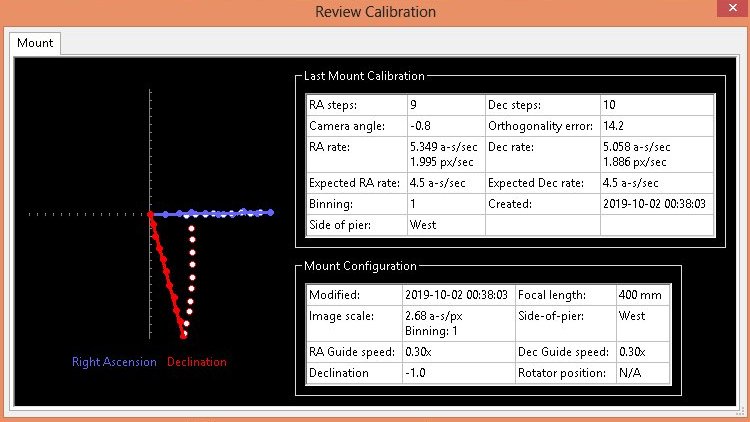
A second attempt, now RA rate and DEC rate looks okay, close to the equator the speeds should be equal. Drift compensation:Because a bug in the stepper motor driver in the mount the Drift compensation must be set correct in EQMOD. 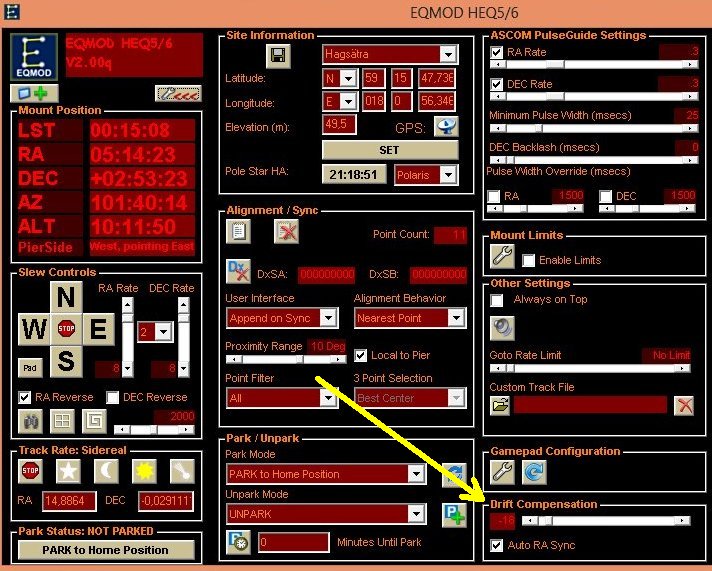
In my old configuration I have to set the drift compensation to 6 to get the correct speed of RA. Because I now have a different gear ratio this drift compensation is maybe different. I try with new values and got it almost correct with -18. I let it track without auto guiding and looking in the the guide window of PHD2 at which drift compensation speed the star stay at the same position. It's easier to see if you place a hair cross in the window. Let it track some minutes and you will see. You also see it on the guide pulses when auto guiding, if it has to send guide pulses all the time in one direction, then RA moves with wrong speed. A wrong polar align can also cause this. Auto guiding: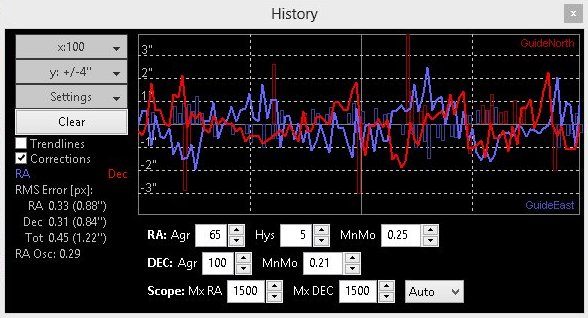
Even if the calibration wasn't perfect I want to do a test with auto guiding, I'm exited to see how it perform. Any difference ? No, after all these works to convert it to belt drive ! But I see that the RA behavior is correct, the guiding pulses is symmetric. 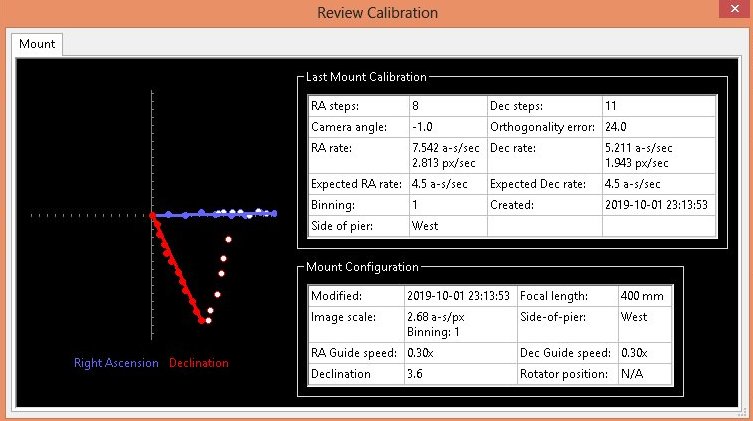
I redo the calibration but got even worse orthogonal error. The drift compensation I added, is it included or not in the figures above ? One more try and I got it correct. 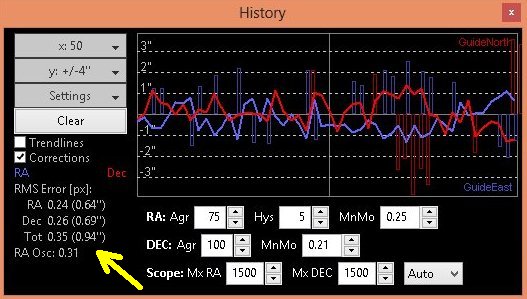
I have increased the RA Agr. to 75% and zoom in on the time axis to have more details, I get down the tot RMS error to 0.94". Maybe not bad but I could achieve that with the old spur gears too. 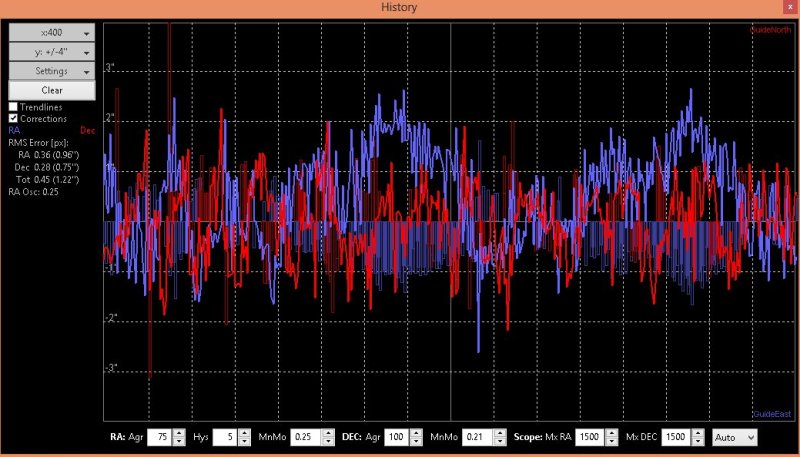
Expand the time axis to see how the RA guiding perform at a longer time scale. There's a clear periodic pattern, slowly variations should be possible to auto guide and then cancel the error. I have to try out better guiding parameters. Already now the auto guide tot RMS error is below 1" so there is hope. PHD2 setup parameters: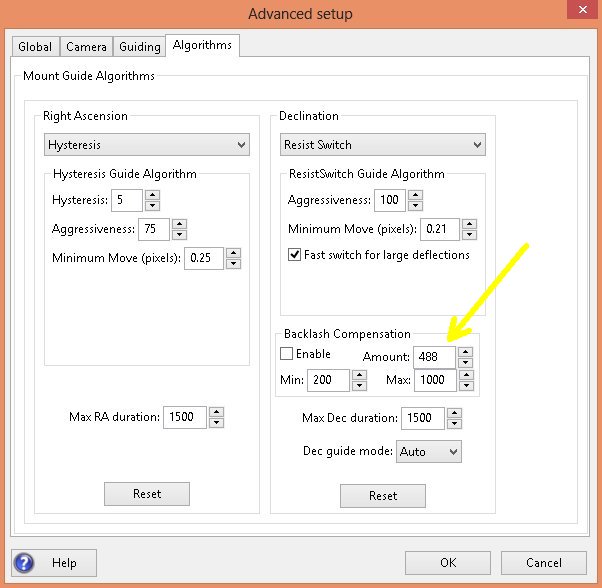
A short look at the algorithms of PHD2. The backlash compensation is interesting, it have found it to be just below a half second. Just wonder how it has found this value, I take a guide picture with two seconds apart. Later when I used the mount for a while I will check the tension of the timing belts if they still are correct. Too loose and it will introduce backlash. New problems to solve, why is the RA and the DEC axis not orthogonal? And the guiding error I have, can it be better with some adjustment of the guiding parameters?
|
|