|
Advertisement / Annons: |
My astronomy project:
|
Contents:
Related projects:
Note: |
17, Deep into the RA drift compensation:Now when I have used my belt modified EQ6 mount for a while I go more into the details to see if there are more that I can do to get it better. The EQMOD's RA drift compensation has always confused me. But what I understand it's a compensation for some bug in the EQ6 stepper motor driver. Some information about EQMOD Drift Compensation:
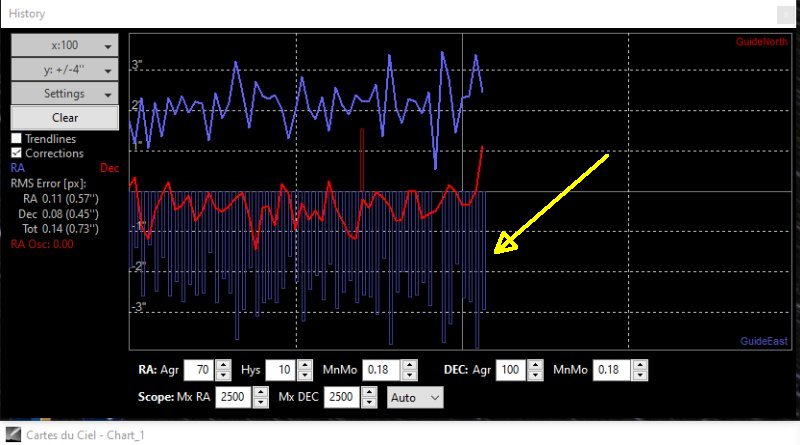
Here is one effect of this RA drift compensation when it's not correct set. If the driver board has this bug the sidereal speed will not be correct. Above can be seen how the auto guider try to slow down the RA speed. It's the guide pulses we see at the arrow. It got worse after my belt modification because I didn't keep the original gear ratio. 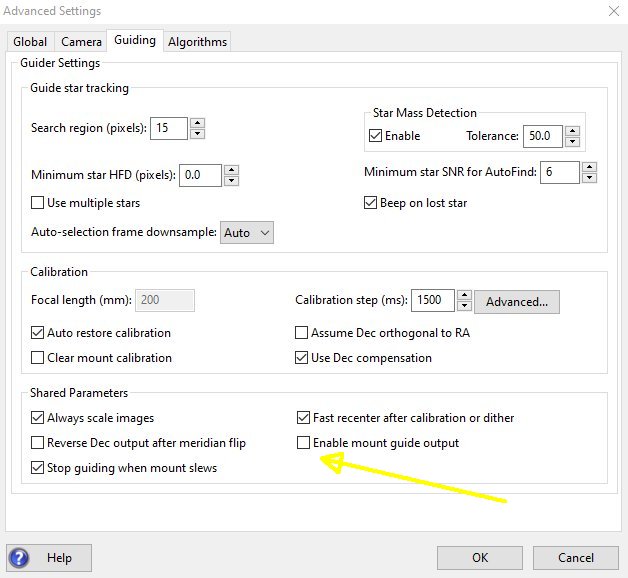
Now I do a test, disable the guiding commands to reach the EQ6 mount in PHD2 auto guider software. 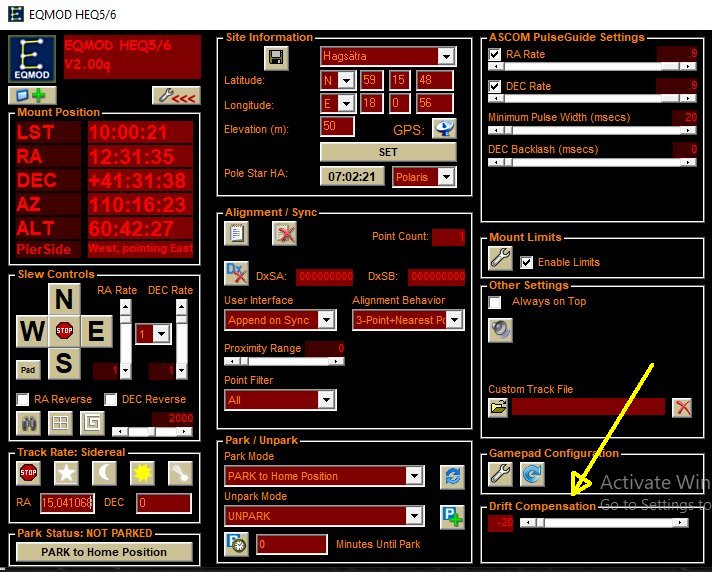
Set the RA drift compensation to most minimum (negative). 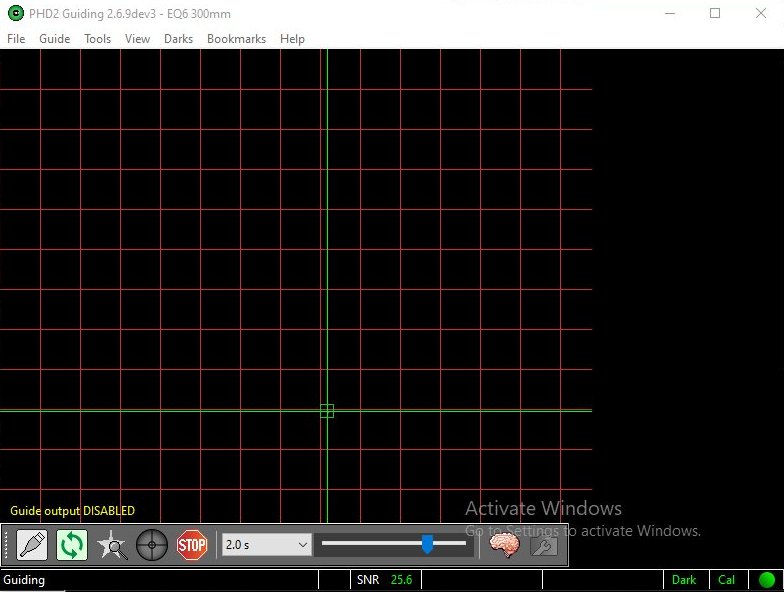
Start the auto guiding in the the PHD2, no connection to the mount. 
Normally we had seen a periodic error curve here. But now when the RA sidereal speed is wrong the RA, blue line drift away. The RA drift compensation was not enough. 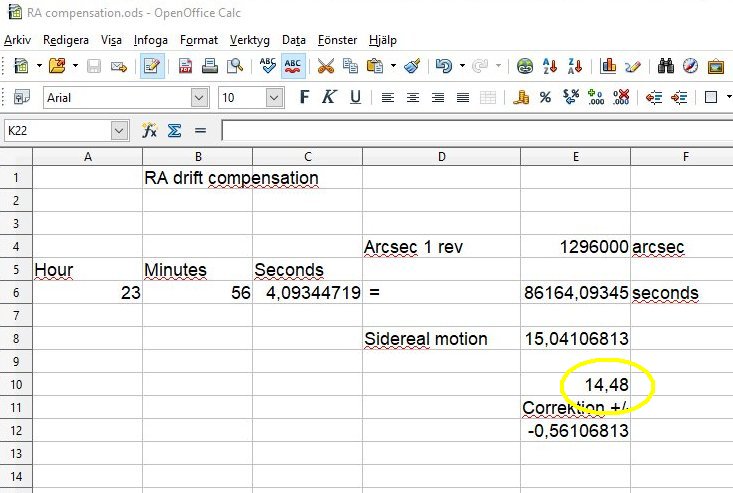
As an alternative I don't use the RA drift compensation, instead I set a Custom rate. With trail and error I found that shall be around 14.48 arcsec / sec, compare with the standard 15.041068 arcsec / sec. 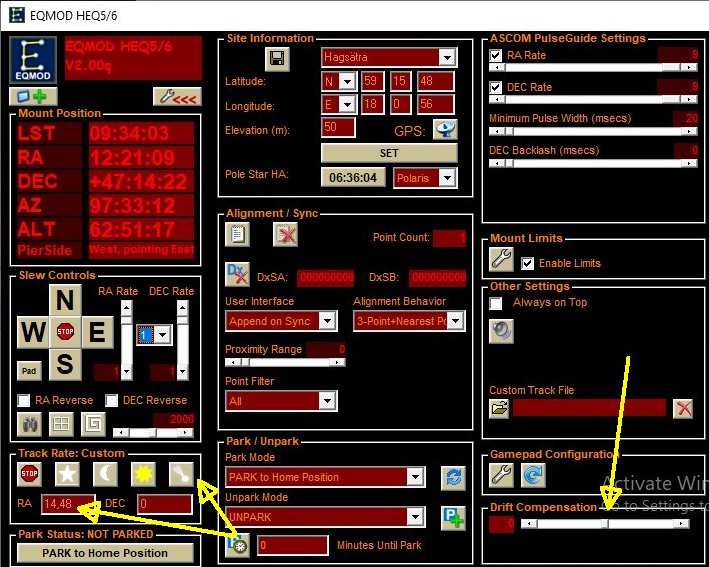
I have set the RA drift compensation to neutral (=0). 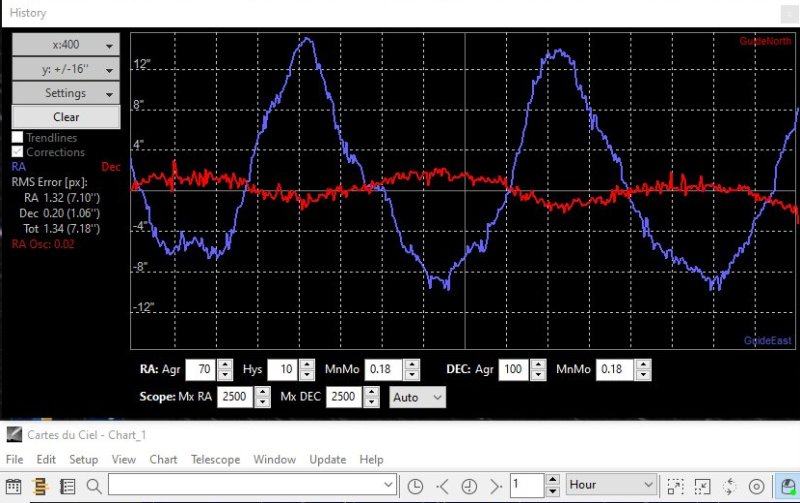
Now the periodic error curve came up after a 20 minutes run. But there are something more to it, next time I do this it drift away again, something has changed. My EQ6 mount's Periodic error is +/- 12 arcsec or 7 arcsec rms. I also have some periodicity on the DEC axis, maybe caused by not perfect polar align. More investigating to do, coming back later. Note this is a small error, the auto guiding handle it, I can still use the mount. One solution can be to replace the EQ6 driver board with an AstroEQ driver. In the end I solved it by rewrite the EQMOD INDI driver. Works like a charm now and have done it for 3 years. The latest is that I replace the original EQ6 driver board with a OnStepX solution: EQ6 and OnStep, looks very promising. If I have to do this again I had done it in a different way. Stepper motors with built in precision planetary gearbox and direct attached to the worm screw.
|
| Go Back |