|
Advertisement / Annons: |
My astronomy project:
|
Content:
Note: |
1: Over viewTo have gears between the motors and the mount's RA and DEC shaft always cause problems and precision gears are expensive to manufacture too. The most elegant solution must be to not have any gears at all. Special purposed built direct driven DC motors are expensive, but they use similar motors in toys, hoverboards. Do you remember the movie, Back to the Future ? I got an old and retired hoverboard and my girlfriend got nervous. Will I get killed on that hoverboard, she thought I'm going to repair it. But the real reason was to take the motors from it, could they be used for a direct driven mount ? More to read about hoverboards: From here I have got some inspirations: Hoverboard:
This bag of parts is what was left of the hoverboard I got after one hour of disassembling. I donated the battery and circuit boards to my friend who has some other ideas of what it can be used for. Believe it or not, he got it to play music ! I found that they still sell spare parts to it and from that page I got some information of data. The hoverboard has two 250 Watt motors and it was equipped with turn signals. A 40 volt battery with 15 ampere max current. It could handle a maximum load of 120 kg and have a range of 20 km. There is also a built-in gyro. 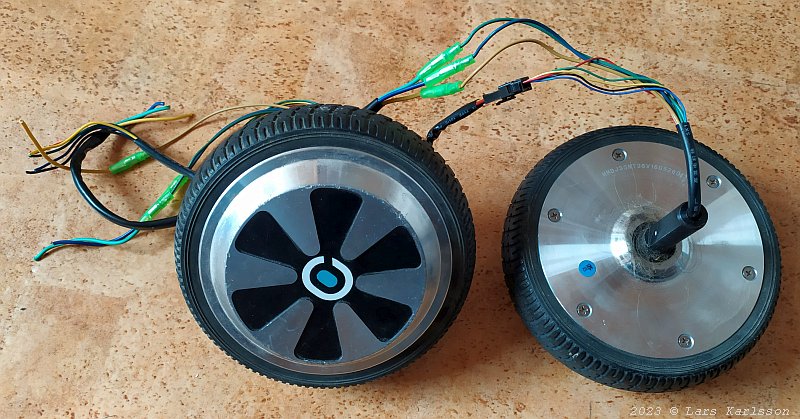
The hub DC motors. They are heavy, 3 kg each, but I don't need the massive rubber tire which will lower the weight when I remove them. It looks to be three phase motors and some built in position sensors. Inside the DC hub motor: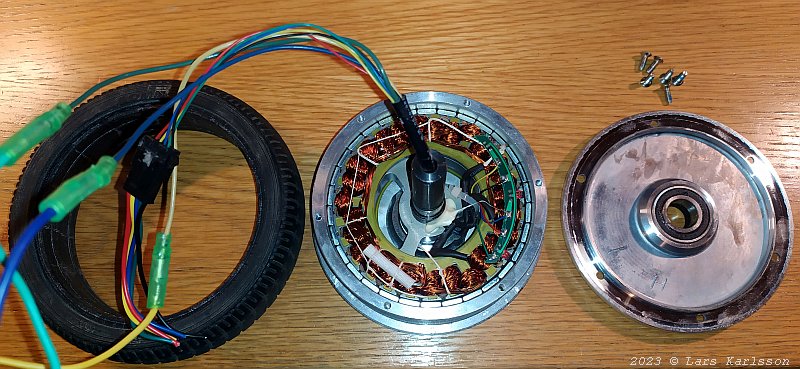
After I had open it up I found these components. They looks like to be of very high quality, surprising when knowing how cheap a hoverboard is. The rubber tire wasn't so easy to get off. 
It looks to be a 27 coils, 9 serial connected coils for each phase, it's a three phase design motor. More is better for slow rotating motors. The green little circuit board at the right edge holds the position sensors, they sense the magnetic field from the motor. If it doesn't work well as a direct driven mount it could be used as an electric generator for a wind mill. 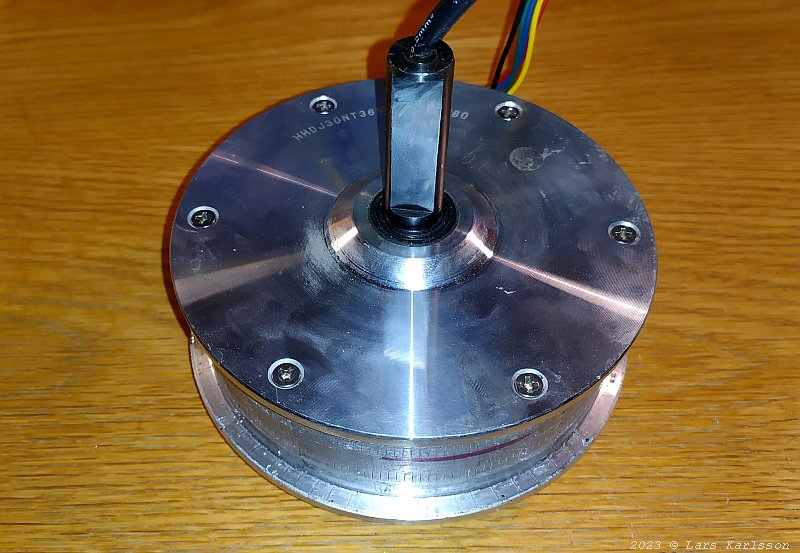
Assembled again, now the weight is reduced to 2.6 kg when the rubber tire is removed, still heavy. The most difficult problem to solve when building a direct driven mount is the need of a high precision position sensor. A resolution of one arc sec compare to 1'296'000 steps for one revolution and one arc sec isn't good enough. Needs one position sensor for each shaft and they could cost 1000 Euro each. For the moment I put these hub motors in the closet until I found some solution on this problem.
|
|