|
Advertisement / Annons: |
My astronomy project:
|
Content:Ideas about 3D-print rack and pinion gears:
Related projects:
Note: |
5: 3D CAD and print of worm gearEarlier when I printed the helical gear for the rack & pinion gear I added a helical gear at the end for an extra gearbox. I need it to have the correct gear ration for a NEMA 17 stepper motor without internal gearbox. Now I do the worm gear. 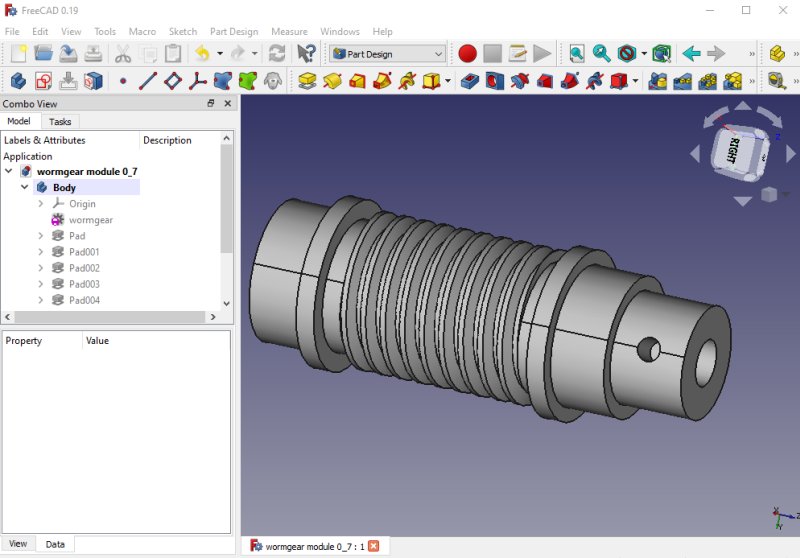
My first worm gear. It's designed to hold two 15 mm roller bearings. The outer diameter is 15 mm and it has one tooth. The hole is 5 mm to attach to the stepper motor of NEMA 17 model. A big motor but I design it to take a load of 4 kg. 
Not to bad, have to do something of the smoothness of the surface. 
The stepper motor I had in my desk, a NEMA 17 model with 200 steps per revolution. The shaft is of 5 mm diameter. 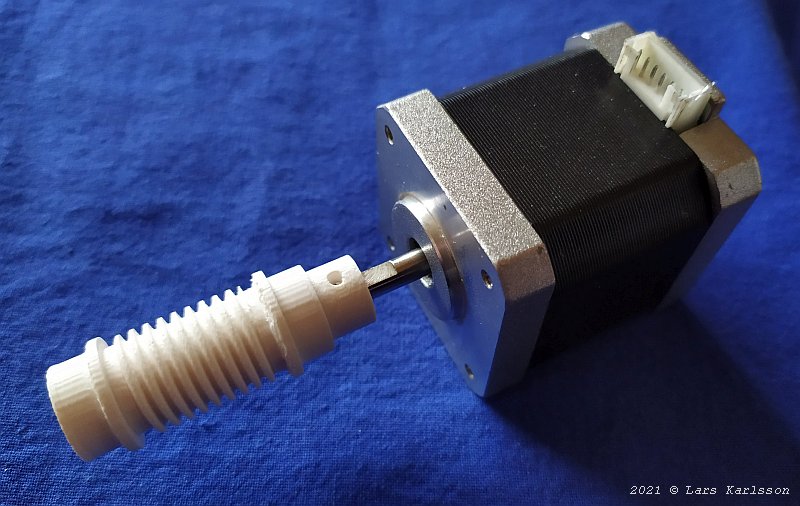
With the worm gear attached on the stepper motor's shaft. Later I shall calibrate the 3D-printer and compensate to get the hole of correct size. Now I have to drill the holes to get it perfect. 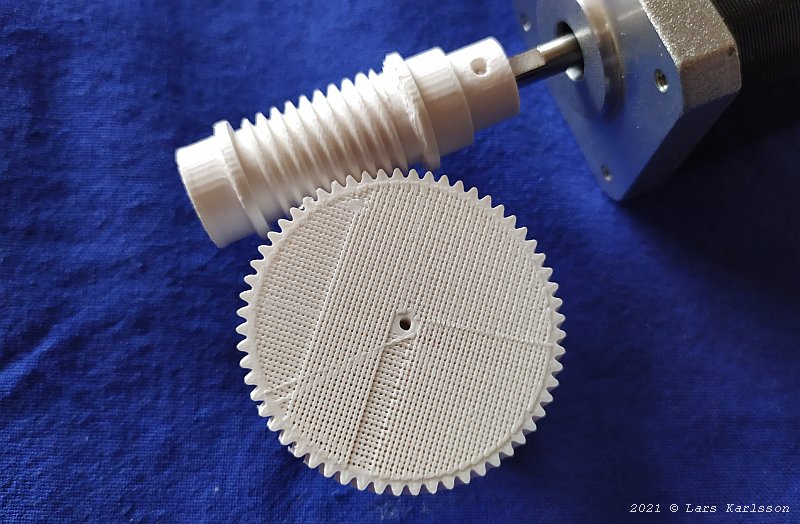
Match the helical spur gear but I need to set the helical angle to another value. If I also can get the teeth to have a curved shape it will be even better. 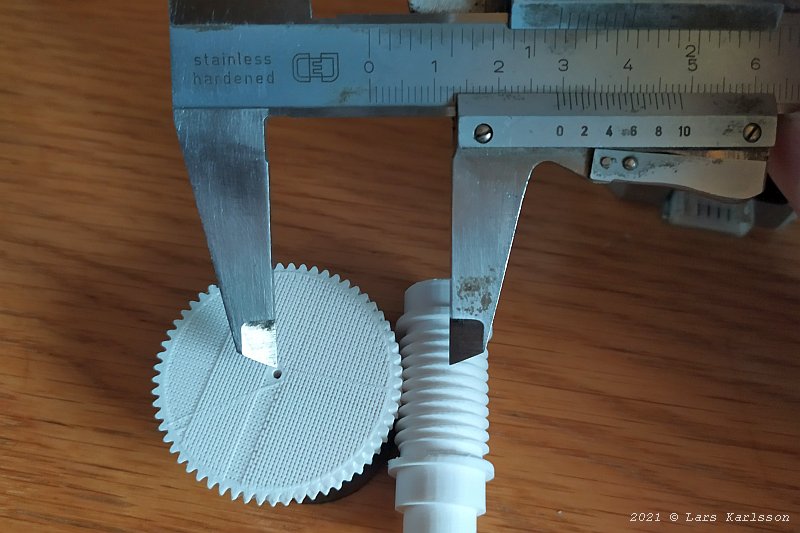
The center to center distance between the shafts is 29 mm. I need that distance to finish the drawing of the focus chassi. I stop here with my Rack and Pinion project. Instead I develop a more advanced construction with Push Pull design: 3" Push Pull focuser.
|
|