|
Advertisement / Annons: |
My astronomy project:
|
Contents:
Note: |
2, OnStep Hardware:To build this new OnStep driver there is a need of some hardware. More to read about OnStep: CPU controller: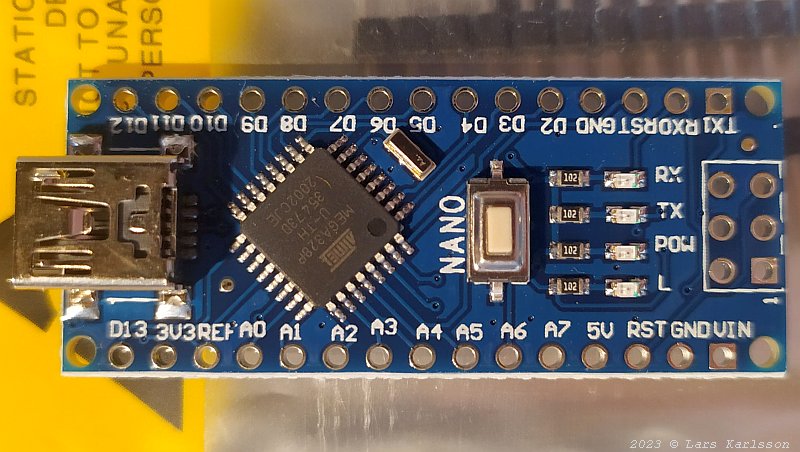
This is the Arduino nano MEGA328p that I used to my stepper motor focuser. Maybe the same can be used to this project. If I can include a normal USB connector there is no need for the EQDirect cable anymore. Or if I can have a built in BlueTooth then there is no need for a cable at all. It will not be connected to a hand controller, only direct to a computer. When reading more about OnStep I found that they say that the Arduino nano has too limited power for this. Overview, cpu boards:
Alternative 1, FYSETC E4 board:
Looks very practical, most devices are included, drivers, WIFI, etc. Compact and it doesn't cost much. Looks to be common to use with OnStep or OnStepX. This one is the most appealing to me. It has documentation for OnStep, drivers for ASCOM and INDI. Four stepper motor drives is already included on the circuit board. I can use the same Arduino development tool that I have used for my 3D-printer and stepper motor focuser. Alternative 2, WeMos R32 with CNC V3 Shield:
No real time clock, but doesn't matter, I take the time from the GPS. There is no WIFI either. Alternative 3, Arduino ATMega 2560:
This one use the big brother of my Arduino Nano. Stepper motor:
In the beginning I use the original stepper motors. NEMA17 standard, 200 step per revolution, 5 mm diameter shaft. Stepper motor driver:
A standard DRV8825 driver board, used in my motor focuser. Stepper motor driver for RA/DEC, there are many to choose from:
Overview of stepper motor drivers: Some demands, it must be compatible with OnStep. Low noise, high efficiency, high resolution at least 64 micro steps. Voltage range 8 to 30 volt. Current at least 2 ampere. On the FYSETC E4 board the drivers are already included. Shield: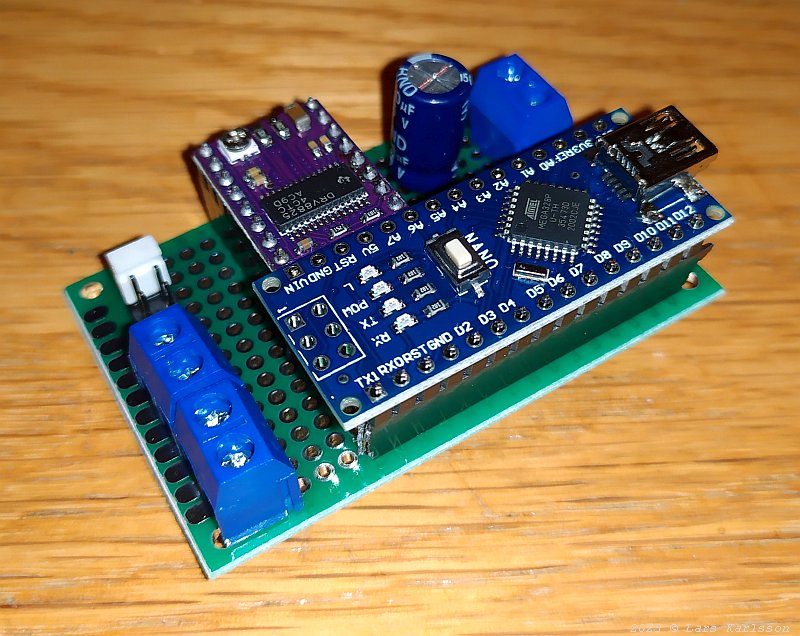
To my focuser driver I used a simple lab circuit board, now I need something more special built for this. A shield, that's what they call the circuit board where you install all the components. If I'm lucky there is some general driver board that I can use with small modifications. If I choose the FYSETC E4 board there is no need for it, everything is included on the main board. Brackets:To built it together there is a need of brackets, of course I 3D-print them. Enclosure:If I placed it inside the EQ6 mount there is no need for a enclosure. |
|
|